
テスラは、物体検知機能を向上させた新しいFSD(Full Self-Driving:完全自動運転)ベータ版ソフトウェア・アップデート(バージョン10.6)を自社のテストユーザーにプッシュし始めました。
これは、FSDパッケージを改善し、何度も延期されてきた顧客との約束を実現するための長い道のりにおける最新のステップです。
テスラは現在、完全自動運転ベータ(FSDベータ)と呼んでいるソフトウェアをゆっくりと展開しています。これは、現在、同社が選んだ少数のテスラオーナーだけでテストされている自動運転ソフトウェアの初期バージョンで、「セーフティスコア」を通じて評価されています。


このFSDソフトウェアは、カーナビゲーションシステムに入力された目的地までの自律走行を可能にするものですが、ドライバーは常に警戒し、自分でコントロールできる状態にしておく必要があります。
責任はドライバーにあり、テスラのシステムにはないので、「完全自動運転」という名前はともかく、レベル2の運転支援システムと考えられます。そしてこれまでは「2歩進んで1歩下がる」タイプのプログラムであり、アップデートによっては運転機能が後退することもありました。
最近のアップデートでは、テスラ自身がリリースノートで運転動作の変更点の詳細を公開しています。
先月、FSD 10.5のアップデートについて、リリースノートとともに報告しました。

本日、テスラは、安全性スコアが98以上の米国内のオーナーに対して、フル自動運転ベータ版の新バージョンのプッシュを開始しています。
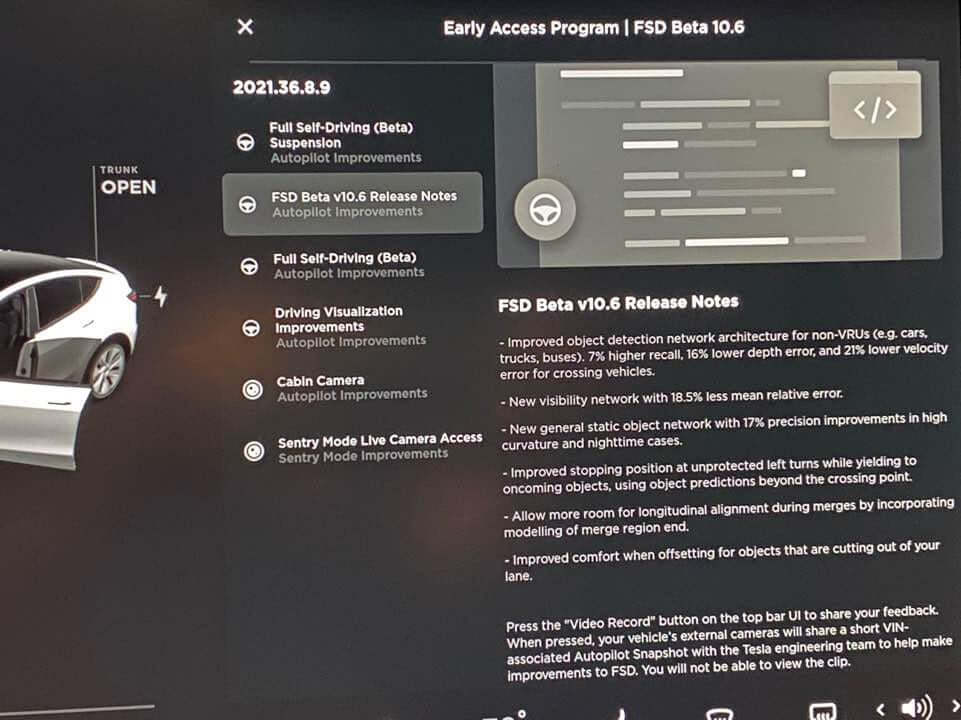
テスラはこのFSDベータV10.6での変更点をリリースノートに書いています。
- 非VRU(自動車、トラック、バスなどの非交通弱者)の物体検出ネットワークアーキテクチャを改善。リコールが7%向上。車両横断時の深度誤差を16%低減、速度誤差を21%低減。
- 平均相対誤差を18.5%低減した新しい視認性ネットワーク。
- 曲率の大きいケースや夜間のケースで17%の精度向上を実現した新しい一般静的物体ネットワーク。
- 左折時に対向車に譲る際の停止位置を、交差地点より先の物体予測を用いて改善。
- 合流領域端のモデリングを組み込むことで、合流時の縦方向のアライメントに余裕を持たせる。
- 自車線をはみ出してくる物体に対してオフセットする際の快適性を向上。
テスラは、スーパーコンピュータ「Dojo」によって改善率が高まると報告しています。今週初め、テスラが自動運転に向けたオートラベリングツールの新しい映像を公開しています。
オートラベリングとDojoが組み合わされることで、この改善率が加速していくかもしれません。
FSDベータV10.6の映像は以下を参照してください。
この記事はこのサイトを引用・翻訳・編集して作成しています。
以前よりはかなりスムーズ?な感じもしますが…。
テスラ関連の最新記事を毎日AM7:00にアップしていますので、過去のニュースはこちらを参照ください。


















※免責事項:この記事は主にテクノロジーの動向を紹介するものであり、投資勧誘や法律の助言などではありません。また、記事の正確性を保証するものでもありません。掲載情報によって起きたいかなる直接的及び間接的損害に対しても、筆者・編集者・運営者は一切責任を負いません。また、運営者はテスラ株式のホルダーです。