
これまでテスラはオートパイロット(自動運転)とFSD(Full-Self-Driving:完全自動運転)を区別してアナウンスし、オプション費用さえ支払えば、HW3(ハードウェア3.0)を搭載した車両についてはFSDに対応できると言ってます。これからテスラの購入をお考えの方に、標準装備されているオートパイロットとは具体的に何なのか、どんなことが実現できてFSDとの違いはどこにあるのかなどについて概要を解説してみたいと思います。
自動運転レベル
最近日本国内でも、ホンダレジェンドがレベル3の自動運転を発表したり、トヨタもようやくレベル2のレクサスとミライを発表したりと、話題に上ることが多くなっています。
この自動運転の程度を表すために、米国自動車技術者協会(SAE)が「自動運転化レベル」としてレベル0~レベル5までの6段階に区分され以下のように整理しています。
※JAFのページを参考に作成
| 概要 | 運転(責任)の主体 | |
| レベル0 運転自動化なし |
ドライバーが全ての運転操作を行う | ドライバー |
| レベル1 運転支援 |
システムがアクセル・ブレーキ操作またはハンドル操作のどちらかを部分的に行う | ドライバー |
| レベル2 部分運転自動化 |
システムがアクセル・ブレーキ操作またはハンドル操作の両方を部分的に行う | ドライバー |
| レベル3 条件付運転自動化 |
決められた条件下で、全ての運転操作を自動化。ただし運転自動化システム作動中も、システムからの要請でドライバーはいつでも運転に戻れなければならない。 | システム (非作動の場合はドライバー) |
| レベル4 高度運転自動化 |
決められた条件下で、全ての運転操作を自動化。 | システム (非作動の場合はドライバー) |
| レベル5 完全運転自動化 |
条件なく、全ての運転操作を自動化。 | システム |
この表を見ると(当たり前ですが)レベルが上がるに従ってその自動運転の程度が上がり、ドライバーの関与と責任が反比例していく関係になっています。
先ほどのホンダレジェンドはレベル3と言っていますので、「条件付き自動運転」かつ「運転操作主体はシステム」ということなので、そのまま聞くと「すごい!」と感じます。
ただ、実際にはこのレジェンドのレベル3は、
「高速道路本線上を走行中、渋滞に遭遇して時速30キロになると自動的にシステムが作動。そして、速度域が時速50キロを超えるとトラフィックジャムパイロットは終了し、システムから運転を引き継ぐ」
https://www.autocar.jp/post/646532
という極めて限られた条件下での作動です。つまり、時速50km超えると運転の責任がシステムから運転者に変わる、こうした限定条件下の自動運転は結局のところレベル2と変わらないとも言えます。
シチュエーションとしては高速道路上の渋滞時限定なのですが、高速道路ですから渋滞が解消されると時速50kmを超えるので、結局監視しておくことが必要です。
実際にテスラに標準装備されているレベル2のオートパイロットで、レジェンドでできることはできると考えて良いかと思います。
結局のところ、その状態の時に、最後の責任をメーカーが取るのかドライバーが引き受けるかの違い、という感じでしょう。
この分類と実際のことを考えれば、自動運転はレベル2〜4の部分自動運転とレベル5の完全自動運転に区分されるものなのだと思います。
オートパイロットとFSD(Full Self Driving)
テスラのホームページを見ても、正直良く分からないので、オートパイロットとFSDを整理すると以下のような表になります。
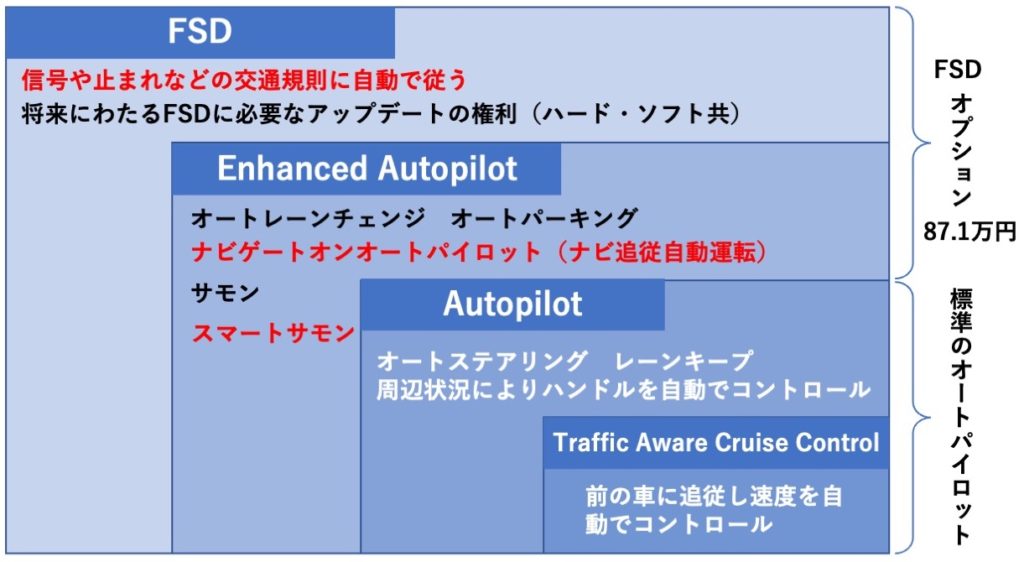
テスラのいうところのオートパイロットとは、下の2つ、つまり速度を自動でコントロールするのと、オートステアリング(自動ハンドルでレーンをキープ)を組み合わせた機能のことを指します。
一方で、FSDオプション(国内では現状87.1万円)では、これに加えて最終的にレベル5の完全自動運転が可能になる「機能」と「権利」を買うイメージです。
また、このそれぞれの機能と区分は法規制等によりその国によって微妙に違うようですし、テスラにありがちな「アップデート」によりどんどん進化していくと思いますので、2021年5月時点の整理です。
このうち、特にオートパイロットについて少し詳しく解説します。
オートパイロット
テスラのオートパイロットは次の二つの「自動化」を組み合わせたものです。
- トラフィック・アウェア・クルーズコントロール:道路の制限速度や周辺の交通状況にもとづき、前を走っている自動車などの状況に応じて速度を加減速または停止できる。
- オートステアリング:道路形状や障害物、前に走っている自動車の状況(トラフィック・アウェア)に応じて、ハンドル操作を自動化し、進むべきルートを保持する。(レーンキープ)
この二つの機能を合わせてオートパイロット(自動運転)と言っています。
実際には、赤信号や止まれの標識などでは止まらないですし、高速道路の入り口で合流したり、出口を自動で選択して降りたりもできませんし、そもそも交差点での右左折ができません。オートパイロットは、放っておくと「道なりに走り続ける」ことになります。
加えて、オートステアリングは「ベータ版」であることがオーナーズマニュアルに明記され、いわゆるレベル2、常時運転者の監視が必要な機能です。
また、通常こういった運転支援機能は高速道路上での利用に制限されていることがほとんどですが、テスラの場合、その制限はなく普通の市街地でもソフトウェアが上記2つの機能が使えると判断すれば、普通に使えます。
この2つの機能を合わせて実現されているオートパイロットですが、その「出来具合」が非常にすぐれものなので、逆に事故を招く事態に陥っています。特に市街地では、十分に注意を払って使うことが重要です。
トラフィックアウェアクルーズコントロール
自動車メーカーにより各社呼び方は様々ですが、一つ目のトラフィックアウェアクルーズコントロールでは、周辺の状況により速度を調整します。
- 前の自動車の挙動に合わせて、速度を調節する
- 制限速度情報から最高速度を設定しその速度を超えないようにする
トラフィックアウェアクルーズコントロールでは、前方監視カメラおよびレーダーセンサーを利用し、同じ車線の前方に車両がいるかを判断します。モデル3の前方を車両が走行していない場合、トラフィックアウェアクルーズコントロールは設定されている走行速度を維持します。車両が検出された場合、トラフィックアウェアクルーズコントロールは、前方車両との間に時間に基づいて設定された車間距離が保たれるよ うに、設定速度を上限として、必要に応じてモデル3を減速させるように設計されています。トラフィックアウェアクルーズコントロールを使用していても、ドライバーは道路の進行方向に常に注意を払い、状況に応じて自らブレーキを踏む必要があります。
テスラモデル3 オーナーズマニュアルより
この制御により自動車のオートマチックな加減速が可能になりますが、EVの駆動はモーターなので、その加減速感は非常にリニアでスムーズですし、ソフトウエアの性能によるのか、特に前に自動車がいる場合の停止、発進がかなりスムーズです。
このトラフィックアウェアクルーズコントロールは、右側のシフトレバー1回下にするとオンになります。その際の設定速度はタッチパネル内の設定で、「制限速度」と「現在の速度」に設定可能です。
つまり、制限速度にするとその道路の制限速度まで自動的に速度を上げてその速度を保ちます。制限速度40km/時の道路を20km/時で走行している時、前者は40km/時まで加速、後者は20km/時をキープするということです。
オートステアリングも一緒ですが、ブレーキを踏むかシフトレバーを上に1度上げるとこの機能は解除されます。
オートステアリング
モデル3のオーナーズマニュアルには以下のように説明されています。
オートステアリングでは、トラフィックアウェアクルーズコントロールに基づき、モデル3が設定速度で走行中に走行車線を維持します。(中略)オートステアリングは、車載カメラ、レーダーセンサー、超音波センサーを利用することで車線マーカーや車両の存在および物体を検知し、ドライバーによるモデル3のステアリング操作をアシストします。
テスラモデル3 オーナーズマニュアルより
このオートステアリングについては、オーナーズマニュアルに明確に「ベータ版」とあります。つまり、まだ未完成の機能を先取りして実際の自動車で使えるようにしているということです。
テスラには良くあることなのですが、このあたりの感覚が既存の自動車メーカーでは考えられないことで、いわば自動車の安全に関する機能を「ベータ版」という形でエンドユーザーに開放しているので、公道上で実際のエンドユーザーを実験台として「ベータテスト」しているのですから。
このあたりの感覚を理解・承知できない場合は、そもそも購入を控えるべき自動車だと思います。オートパイロットも、FSDオプションを付けた場合でもあくまで「レベル2」なので、要するに何かあった際には、すべてドライバーの責任ということの理解です。
このオートステアリングはベータ版というだけあって、まだまだ改善の余地はあるのですが「自動運転ってこんな感じ」という印象を強く持つのも事実です。
センターラインや道路形状、前を走行している車の挙動などに応じてハンドルを自動で操作してくれるのを見ていると、その「未来感」は半端ないのです。
オートパイロットの得意な場所
速度追従と自動操舵の2つの機能で実現されているオートパイロットは、やはり高速道路や幹線道路のように白線が明確に描かれている自動車専用道路では、オートパイロットの名にふさわしい快適運転を実現してくれます。
先程も触れましたように、オートパイロットは「道なりに進む」機能ですので、交差点や信号、横からの飛び出しなどが無い環境で非常に優秀な「自動運転」を実現してくれます。
つまり高速道路以外では、交差点の多い市街地よりも「道なりに進む」カントリーサイドの幹線道路が得意です。
オートパイロットが苦手な場所

様々な障害物がある市街地や白線がはっきりしない道路はもちろんですが、路肩に駐車車両があるような状況が苦手です。
例えば、写真のようにトラフィックペイントが明確に描かれていても、左側に駐車車両がある場合です。
人間の運転の場合には、センターラインが黄色でも、駐車車両のドアが開くかも?みたいなことを想定して前から車が来ていない場合には、ラインを跨いで少し大回りで進もうとすると思います。
一方で、オートパイロットをオンにしてここを通過する場合は、速度を落として駐車車両とセンターラインの「真ん中」を進もうとします。もちろん、駐車車両にぶつかることは無いのですが、この感覚が人間の感覚と違うので、まだまだ「こなれていない」印象です。
更に操作上の違和感の一つとして、オートパイロットをオンにするとクルーズコントロールとオートステアリングの両方が有効になるのですが、交差点や曲がり角で方向指示器を出すと2つの機能の内、オートステアリングの機能のみ解除されます。通常交差点に進入する際には減速すると思いますが、テスラは「ワンペダルドライビング」なので、ブレーキを踏みません。つまり交差点内でもクルーズコントロールで速度を維持しようとするので、「交差点に進入しつつ加速する」という状況が生まれやすくなり、結構ヒヤッとします。
オートパイロットは「ブレーキを踏む」(もしくはシフトレバーを一度上にあげる)と解除されるので、交差点でブレーキを踏めばいいだけなのですが、通常ワンペダルで運転しているので少し危ない感じになってしまうということです。
また、曲がりくねった山道など、カーブがきつすぎると解除されてしまうことがあります。速度と、曲率の関係ですが、これもなかなか怖いので結局の所、日本のように道が狭くて、カーブも多い環境ですと、すぐに運転を代われるように身構えておく必要があります。
まもなくFSD V9.0登場?
以前のエントリーで、FSDがまもなくアップデートすることをイーロン・マスクがツイートしているのをお伝えしました。

少し誇張して表現することの多い「テクノキング」なのですが、恐らく5月中には「心を揺さぶる」新しいバージョンがお目見えすると思います。このFSDは米国でのみ、かつ選ばれたモニター参加者のみが利用できる機能なのですが、少なくとも「ビジュアル」や使用感についてレポートが上がると思いますので、またご紹介します。

2週間前に、2週間後にと言っておきながら、再度1〜2週間後と言っているのでいつもどおりですが、新たに上記の記事では、イーロン・マスクが “I think we’re maybe a month or two away from wide beta. But these things are hard to predict accurately.”(ワイドベータ版のリリースまでは、あと1〜2ヶ月といったところでしょうか。しかし、こうしたことを正確に予測するのは難しい)といっていますので、9月頃?にはFSDが広範囲にアップデートされるかもしれませんね。
最後までお読みいただきありがとうございました。テスラ購入の際は、無料特典お忘れなく!


















※免責事項:この記事は主にテクノロジーの動向を紹介するものであり、投資勧誘や法律の助言などではありません。また、記事の正確性を保証するものでもありません。掲載情報によって起きたいかなる直接的及び間接的損害に対しても、筆者・編集者・運営者は一切責任を負いません。また、運営者はテスラ株式のホルダーです。