
FSD搭載のテスラを運転したことがある方なら、画面上のビジュアライゼーションは常に興味深いものです。これはFSDを支えるニューラルネットワークをリアルタイムで垣間見せるもので、システムが認識する車線、物体、交通制御を表示しています。
2025年9月11日付で新たに公開されたテスラの特許出願書類は、このビジュアライゼーションの将来像をこれまでで最も明確に示しています。「視覚ベースの高精度占有判定および駐車支援アプリケーション向け人工知能モデリング技術」と題された本特許は、現在のグラフィックをさらに豊かで高精細な3D世界再構築へと進化させる複雑なAIモデルを詳述しており、テスラビジョンを実装して利用することになっています。
特許に添付された画像は、この未来像を驚くべき形で予見させてくれます。パーキングシーンを詳細に立体的に再現したもので、リアルな表面質感、影、塗装された地面のマーキングまでがシステムによって認識されています。このデータを基に、Unreal Engineで実装してユーザーインターフェイスへレンダリングする技術こそが、近い将来に目にするであろう姿でしょう。

これは単なる見た目の改良ではなく、飛躍的な知覚システムの視覚的出力です。これにより強力な新しい機能が実現され、まずはオートパーキングやスマートサモン(サモン機能のアップグレード)、そして最終的にはバニッシュ(駐車場内で運転手なしに自動駐車するシステム)におけるテスラの低速操縦システムの完全な刷新が始まります。
高精細占有ネットワーク

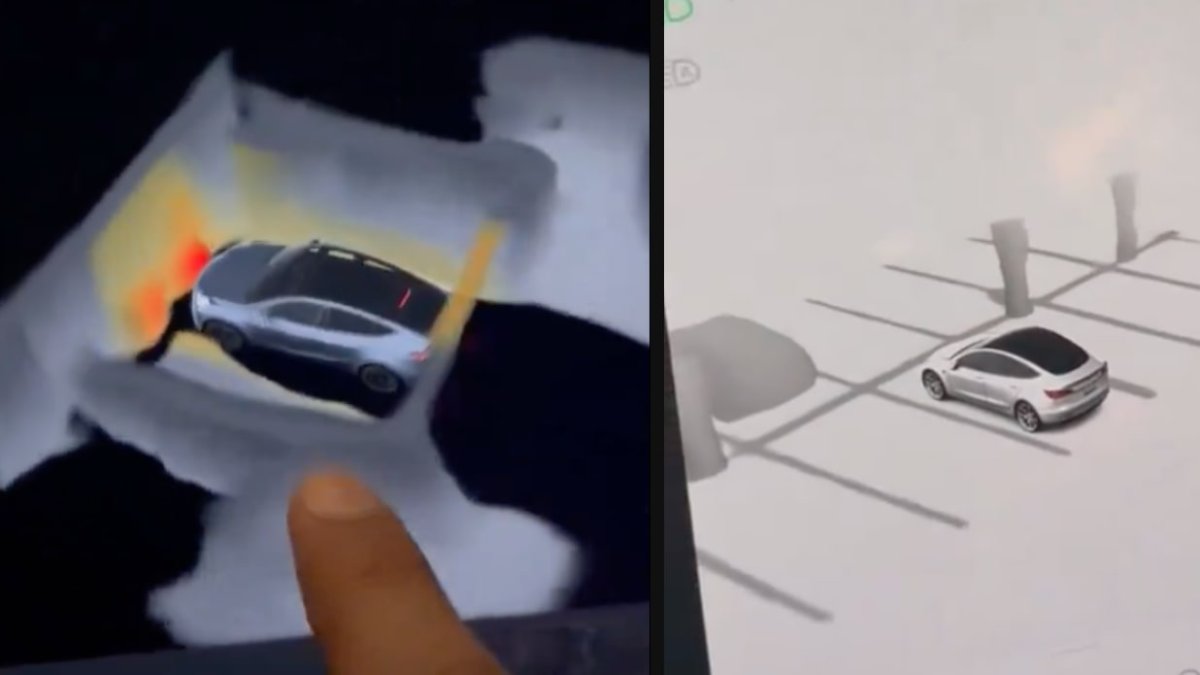
この技術の飛躍を理解するには、まず特許の中核技術である高精細占有ネットワークを理解する必要があります。現在テスラには2つのビジュアライゼーションシステムが存在します。1つは現実世界をより忠実に再現するシステムで、車のカメラのデータを実装してモデルを生成します。もう1つはFSDで見られるように、物体を認識し事前定義された3Dモデルで置き換えるシステムです。前者のビジュアライゼーションは、AMDインフォテインメントシステム搭載車の低速操縦時に確認できます(上記画像)。
FSDのビジュアライゼーションは3Dモデル実装して明瞭ですが、モデル化された対象のみ表示可能であり、壁や建物など多くの物体は含まれません。自動車、トラック、歩行者、犬、電柱などには汎用形状を提供します。また、車線やその他の交通標示も、車両が認識したままの状態で表示されます。
テスラのハイ・フィデリティ・パーキング・アシストに採用されている占有ネットワークは、異なる仕組みで動作します。車両周辺の3D空間全体を、ボクセル(体積ピクセル)と呼ばれる微小な立方体のグリッドに分割し、AIモデルを実装して各ボクセルが物体で占有されているか、あるいは「空」の空間であるかを判定します。
特許で詳述されている重要な革新点は、テスラがその占有状態をどのように判定するかです。単純な二値判定(占有/非占有)ではなく、テスラのモデルは「符号付き距離場(Signed Distance Field:SDF)」を予測します。最も簡潔に説明すると、3Dグリッド上の任意の点について、モデルはその点が最も近い固体サーフェスまでにある正確な距離を計算します。物体の外側にある点は正の値、内部の点は負の値、表面上の点は正確にゼロの値を取得します。これが距離場の符号付き部分です。
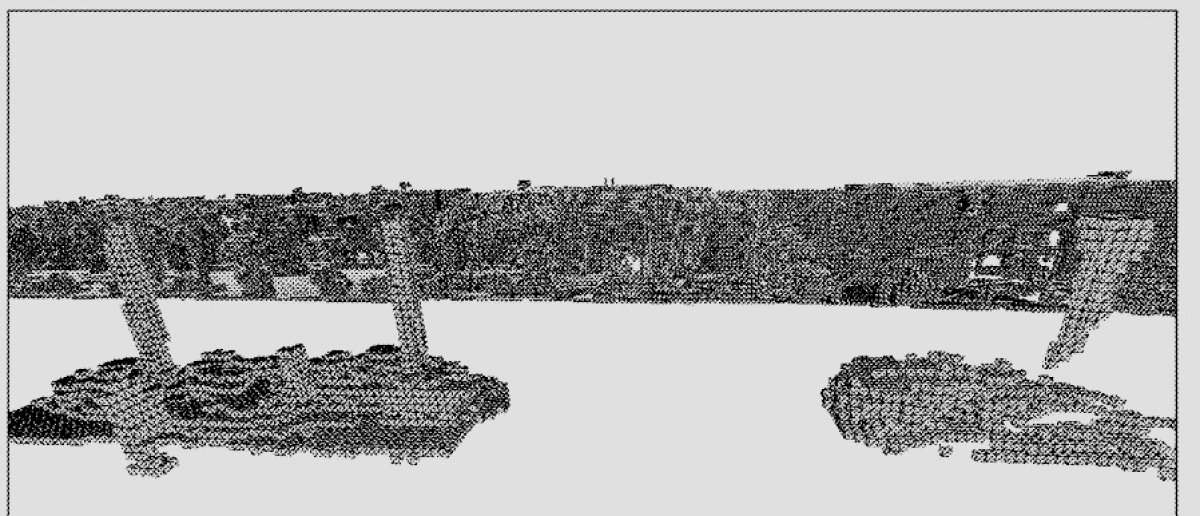
この技術により、テスラは一般的なビジョンモデルをはるかに超えた、驚くべき詳細さと精度で物体の形状を再構築できます。特許には、SDF手法で達成された高品質なレンダリングと、生のセンサーデータからのノイズが多く不完全なビュー、あるいは単純なボクセルグリッドからのブロック状のビューを比較した図が含まれています。これは処理負荷を大幅に増やすことなく、画期的な品質向上を実現しています。
最も優れた点は、この技術が完全にテスラビジョンに依存していることです。3D再構築の全工程、その細部に至るまで、車搭載の2Dカメラ映像のみに依存して達成されており、LiDARやレーダーには一切依存していません。
低速操作における革命
超現実的なビジュアライゼーション自体は画期的な機能であり、ユーザーにとって間違いなく注目を集めるものですが、その主な目的は、さらに高度な自動運転を実現することにあります。特許で説明されている最も詳細な応用例は、テスラのオートパーキング機能に対する大規模なアップデートです。
この新しいAIモデルによるプロセスは、以下の流れで動作します。
- まず、FSD(フルセルフドライビング)が、低速走行状態、既知のパーキングと一致するGPS位置情報、または標識・駐車スペース・他車の向きを視覚的に識別することで、車両がパーキング可能なエリアに入ったと判断します。
- 次に、高精細3D世界再構築技術を実装して、利用可能な駐車スペースを1つ以上特定します。システムは、オープンなパーキングにおいても、ペイントされたラインに基づいて駐車スペースを識別できます。また、障害者用スペースの特定のペイントマーキングも認識可能です。現在と同様に、ユーザーは認識されたパーキングスペースを選択できます。将来的には、FSDが自らパーキングスペースを選択することも可能になるでしょう。
現在のオートパーキングからの真の変化は、単にパーキングスペースを選択する点だけではありません。それを可能にするのは、3D空間全体に対する基礎的な理解という事です。これにより、オートパーキングはユーザーの操作なしに、より迅速に、より確実に、より狭いスペースへ駐車できるようになります。
もちろん、オートパーキングはここでの解決策の一部に過ぎません。サモンとバニッシュも、テスラがこの新しい特許技術を適用する上で重要な要素となります。これらの機能はいずれも3D再構築技術から大きな恩恵を受け、車が自身の位置をより正確に把握し、複雑な都市空間をナビゲートすることを可能にします。
ユーザーへの影響
本特許で示された技術は、FSD(フルセルフドライビング)の体験が、車内にいようといまいと、根本的に直感的で信頼感に満ちたものとなる未来を予感させます。現実世界を正確に反映し、周囲の物体の精密な形状を再現するビジュアライゼーションは、抽象的なグラフィックでは到底及ばない確かな安心感を提供します。車両が環境をどのように認識し理解しているかを明確に伝えることで、ドライバーやユーザーからの信頼を築くのです。
本特許は、カメラ以外の追加センサーを必要とせずに、テスラビジョンが距離の判断や車周辺の3D空間理解においていかに効果的であるかを詳細に技術的に設計したものです。また、ミリメートル単位の精度を必要とする特殊システムを除き、カメラがLiDARやレーダーに取って代わることができるとテスラが確信している証左でもあります。カメラはニューラルネットワークの効果的な実装により、平面的な2D画像を世界の3D表現へと変換しつつあります。
テスラの「ハイ・フィデリティ・パーキング・アシスト」機能にはその端緒が見られますが、将来的にはさらに詳細化が進み、いずれは現在のFSD(フルセルフドライビング)ビジュアライゼーションに取って代わるでしょう。




















※免責事項:この記事は主にテクノロジーの動向を紹介するものであり、投資勧誘や法律の助言などではありません。また、記事の正確性を保証するものでもありません。加えて、記事内のリンクにはアフィリエイトリンクが含まれていることがあります。また、掲載情報によって起きたいかなる直接的及び間接的損害に対しても、筆者・編集者・運営者は一切責任を負いません。更に、運営者はテスラ株式のホルダーです。
コメント
テスラがカメラのみで3D空間を正確に把握できるのか──この点については、技術的にも制度的にも疑問が残る。
LuminarのLiDAR「Halo」は、リアルタイムで3Dデータを取得し、物理空間を忠実に再現する。一方、テスラのカメラベースFSDは、過去の2D画像をもとにAIが推定処理を行い、3D空間を構築するに過ぎない。
この違いは決定的だ。例えるなら、凶器を振るう暴漢に遭遇した際、リアルタイムで凶器の動きを把握して身をかわすのがLiDAR。一方、カメラベースのFSDは、過去の映像をもとに「たぶんこう動くだろう」と推定して対応するようなものだ。危険回避の精度と即応性において、両者の差は明白である。
実際、私は2025年6月までにテスラが自動運転タクシーを開始できないと警告していたが、現状はその通りになっている。制度的な認可も技術的な完成度も、商用無人運転には至っていない。
そして奇しくも、テスラが進める「Halo Project」と、Luminarの最新LiDARの名称「Halo」が一致している。
これは偶然の一致か、それとも技術的転換の予兆か──神の啓示と呼ぶには、あまりに示唆的だ。
テスラの主張を鵜呑みにすることは、欺罔に陥るだけです。
【参考文献】
「ルミナーのLiDARは「リアルタイム3Dで実物再現」テスラのカメラは「過去の2Dで実物推定」」
https://note.com/jun915/n/n89575f03d50a#a75cdbe0-4e72-4273-b8be-05d970d895f5
➡(一部抜粋)
ルミナーのLiDARが提供するのは「リアルタイムの3Dデータ」で「実物を再現」する一方で、テスラのカメラが提供するのは「過去の2Dデータ」で「実物を推定」して3D化する。
例えるならば、凶器を振るう暴漢に遭遇した際、その場でリアルタイムに凶器を避けて身をかわすのと、警察に連絡して対応を待つ程の決定的な差にどうして着目しないのでしょうか?