テスラは2022年9月30日、米国カリフォルニア州パロアルトで人工知能に関するイベント「AIデー2022」を開催し、AIの世界における最新の開発状況について詳しく説明しました。その中では、完全自動運転(FSD:Full Self-Driving)も活発に議論が行われました。CEOであるイーロン・マスク氏はイベント前に、非常にテクニカルな内容になると予告していましたが、実際にその期待を裏切らない、私達素人にとって非常に難解なものになっています。
ここでは、テスラのAIデー2022の完全自動運転のセクションを、概念の簡略化を図りながら見ていくことにしましょう。
テスラは冒頭、数字で議論を始めました。テスラはこれまで、281種類の学習モデルで35のリリースを作成しまし、さらに興味深い数字として共有されたのは、プルリクエスト(コードのマージ回数の合計)18,659回です。
FSDベータ版では、合計480万件のデータセットが使用されています。

FSDブロック
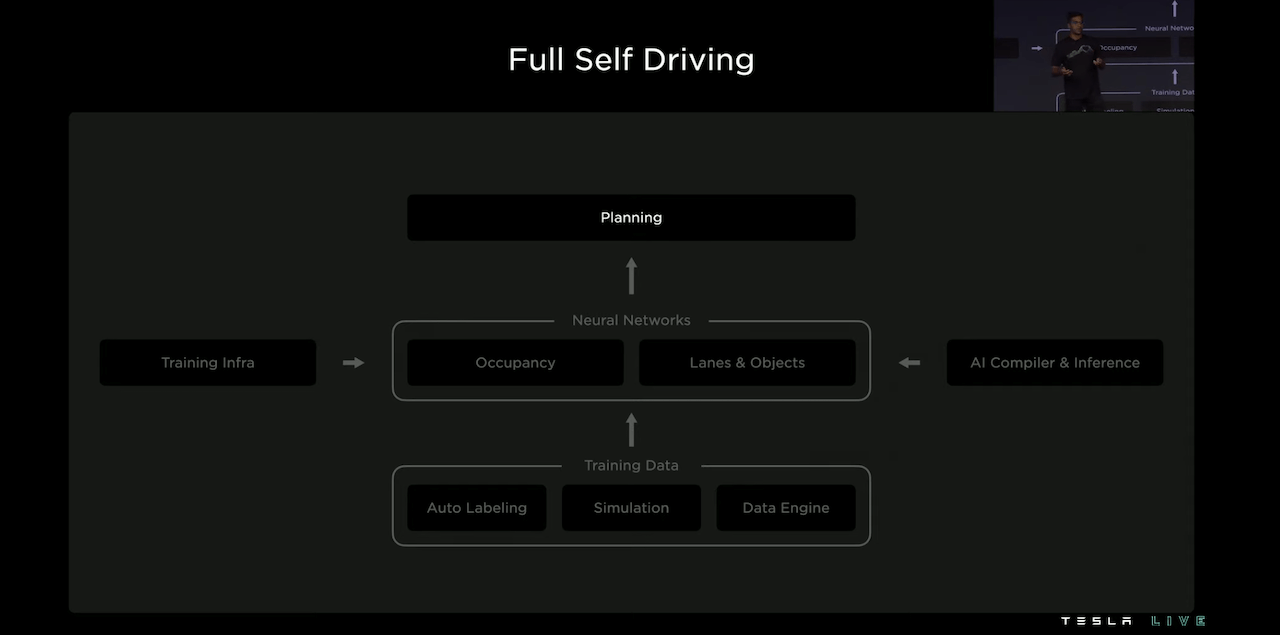
テスラは次に、「テスラAIデー2022」のFSD完全自動運転セグメントにおいて、さまざまなトピックをどのようにカバーするかを示すフローチャートに移りました。自動ラベル付けされたデータ、シミュレーションデータ、データエンジンからのトレーニングデータは、プランニングに向かうさまざまなニューラルネットワークに供給されます。
それぞれは、カンファレンスを通じて、より深くカバーされました。
プランニングセクション
このニューラルネットワークは、ギャップコントロールのようなものを決定します。あなたが交差点で左折しているところを想像してください。横断歩道には歩行者がいます。車はいつ行けば安全か?プランニングとは、意思決定をすることだと考えてください(もっとたくさんありますが、ここでは簡略化します)
テスラは「インタラクションサーチ」と呼ばれるものを使っています。車線、占有率(その車線で何が起こっているか)、その他の移動する物体を調べ、ニューラルネットワークの最初の層は、まず車線はどのようなものになっているか、を見るようです。
そして、邪魔にならない物(レーンを占拠しているもの)とレーン内の相互作用(歩行者や物体)に枝分かれしていきます。
そして、どの程度介入する可能性があるのかを計画します。衝突しないか、衝突しないか、衝突しないか、衝突しないか、衝突しないか、衝突しないか、衝突しないか、衝突しないか、衝突しないか、というチェックが行われ、そしてデータに矛盾がないか?も検討されるのです。
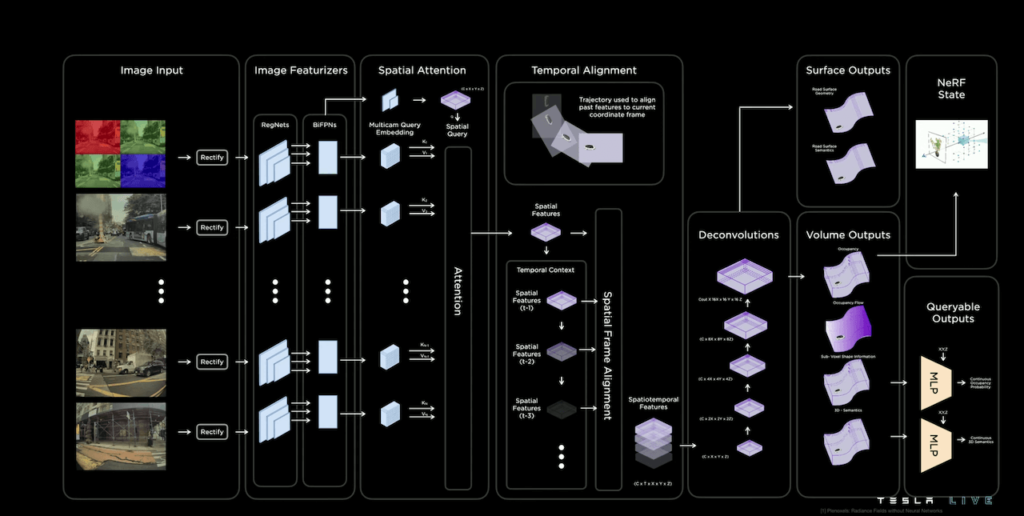
オキュパンシーネットワーク
このネットワークは、縁石、車、道路の形状、そして一般的な物の行き先を予測するものです。このネットワークは、基本的な物体ネットワークではなく、車が走行可能な路面を作り出します。
カメラの画像は、標準的なRGBではなく、生写真を使用しています。写真から特徴を抽出し、空間的な特徴を持つ3Dモジュールを作成します。その後、「デコンボリューション」を経て、最終的な出力が行われます。テスラは、より高解像度の出力を求めて、「クエリ可能な出力」を使い、「NeRF」を使って、2D画像から3D環境を作り出しています。
テスラでは、オートラベル付きのデータセットも使用しています。毎秒40万本のビデオをキャプチャしています。Pytorch(非常に有名な機械学習フレームワーク)のカスタム拡張機能を使って、データをストレージからGPUに転送して学習させています。
車線予測
交差点の向こう側が見えないことがあるので、予測を使う必要があるそうです。入力データを提供する 「ビジョンコンポーネント」があります。テスラは、それに加えてマップコンポーネントを追加しています。これは、地形情報を含んだ道路地図データです。HDマップではないので、例えば車線がいつ終わるかなどは事前に分からないとレポートされています。テスラは次に、「言語」コンポーネントと呼ばれるものを追加します。これは、3次元空間における車線位置のことです。言語コンポーネントには、与えられた3D空間内のすべての車線をマッピングする予測グリッドがあります。それがセグメントの終わりまで何度も何度も走り抜けるようです。この車線予測は、特にあなたとテスラが道路をはっきりと見ていない可能性があるため、必要なものとのことです。
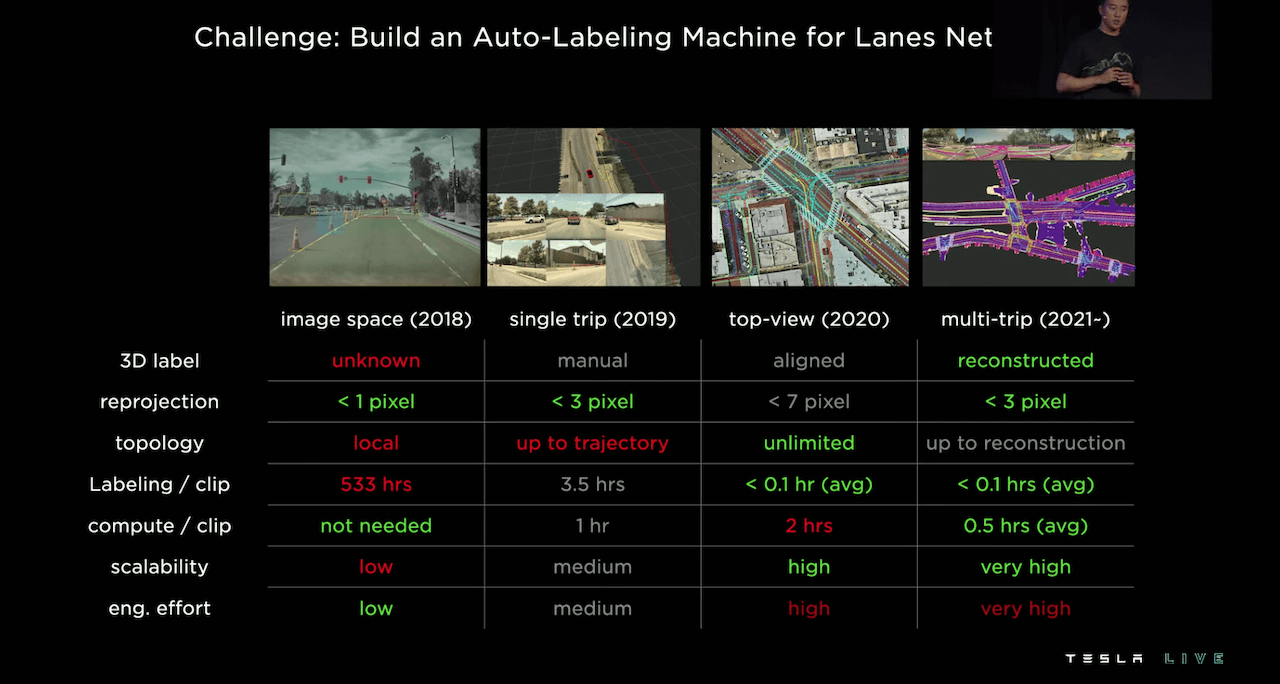
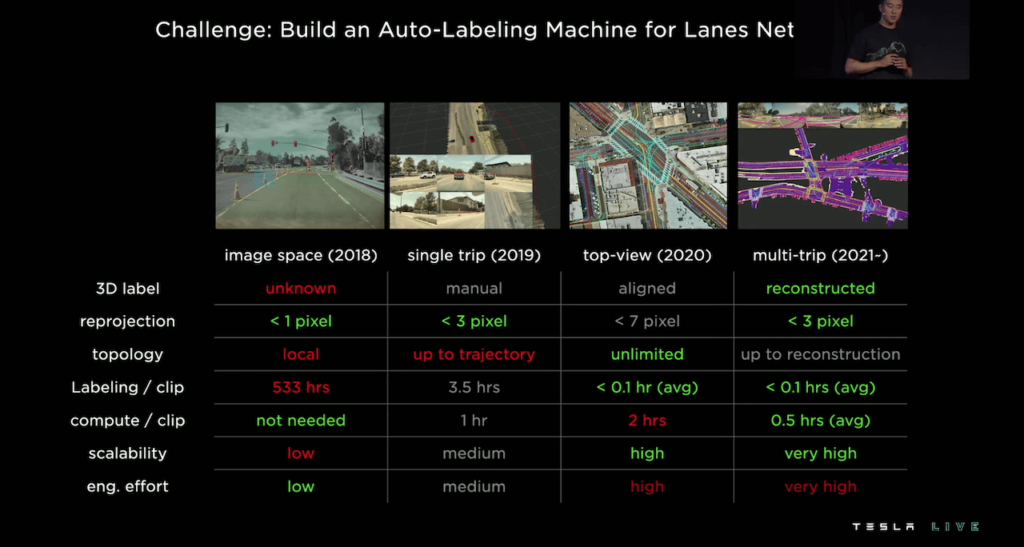
オートラベリング
テスラは現在、1日あたり50万の交差点キャッシュに制限されているとのことです(データストレージの制限)。彼らは10億交差点に到達したいと考えています。明らかに、目標値と限界の間で計算がうまくいきません。現在では、2020年のアプローチよりもスケールが良く、ラベリングも速い「再構築」版を使用しています。彼らは、プランニングのために、ほとんどすべてのタスクにオートラベラーを使っています。暗闇、雨、霧など、さまざまな気象条件下でも自動でラベリングしてくれます。
シミュレーション
実世界のデータを得ることが難しい状況があります。そこで利用されるのがシミュレーションです。イメージとしては、ゲームのワンシーンを作り、そのデータをもとに運転中のわかりにくい点を修正するようなものです。テスラがこのシミュレーションを作成するための手順は以下の通りです。
- グランドトゥルースラベル→ラインデータ、スロープの作成
- 次にレーンペイントの詳細を追加
- ランダムな特性を生成
- 地図データから交通データを追加
- レーンコネクティビティに関しては、道路標識の作成
- ランダムな交通量を追加
これらはすべて自動で行われ、5分以内に設定することができます。テスラでは、素材の入れ替えや場所の変更も可能で、無限にシーンを作り出し、新しいグランドトゥルースを作ることができます。現実世界からは作れないデータを作るために、予測をするための新しいフローを作りだします。
データエンジン
運転中には想定し得ない稀な場合があります。テスラはテスト動画で評価セットを作ることができ、テスラが運転している中で、まさに取り組んでいることに遭遇した具体的なデータを集めることができるのです。そして、トレーニングし、修正し、テストすることを繰り返します。
すべての詳細を知りたい方は、以下のAIデー2022のプレゼンをご覧ください。FSDのセクションは、58分あたりから始まります。
この記事はこのサイトを引用・翻訳・抜粋・編集して作成しています。
テスラ関連の最新ニュースをほぼ毎日アップしていますのでこちらを参照ください。
グーグルニュースでフォローする


















※免責事項:この記事は主にテクノロジーの動向を紹介するものであり、投資勧誘や法律の助言などではありません。また、記事の正確性を保証するものでもありません。掲載情報によって起きたいかなる直接的及び間接的損害に対しても、筆者・編集者・運営者は一切責任を負いません。また、運営者はテスラ株式のホルダーです。
